Moonyoung (Mark) LeeI am a PhD student at the Carnegie Mellon University, Robotics Institute where I work on robot learning for manipulation. I am co-advised by Oliver Kroemer and George Kantor. From 2017 to 2020, I worked at KAIST Humanoid Research Center, the winning team of the DARPA Robotics Challenge. As a research engineer, I worked on computer vision for real-time terrain mapping as well as 3D object pose estimation for pick-and-place tasks. I graduated from Cornell University (B.S & M.Eng) in electrical engineering. Previously I interned at FieldAI Inc. and iRobot Inc. . |

|
ResearchI'm interested in contact-rich manipulation using multi-modal learning (vision, tactile) & learning dynamics model of deformable objects for sim2real. |

|
StageACT: Stage-Conditioned Imitation for Robust Humanoid Door OpeningMoonyoung Lee, Dong-Ki Kim, Jai Krishna Bandi, Max Smith, Aileen Liao, Ali-akbar Agha-mohammadi, Shayegan Omidshafiei IEEE Conference on Robotics and Automation (ICRA) under review, 2025 paper / website / Autonomous loco-manipulation policy for humanoid door opening, trained entirely from human demonstrations. We use stage-conditioned imitation learning framework that augments low-level policies with task-stage inputs. |
|
Hearing the Slide: Acoustic-Guided Constraint Learning for Fast Non-Prehensile TransportYuemin Mao, Bardienus P. Duisterhof, Moonyoung Lee, Jeffrey Ichnowski IEEE Conference on Automation Science and Engineering (CASE), 2025 paper / website / We propose a novel method to learn a friction model using acoustic sensing that maps a tray’s motion profile to a dynamically conditioned friction coefficient. This learned model enables an optimization-based motion planner to adjust the friction constraint at each control step according to the planned motion at that step. |
|
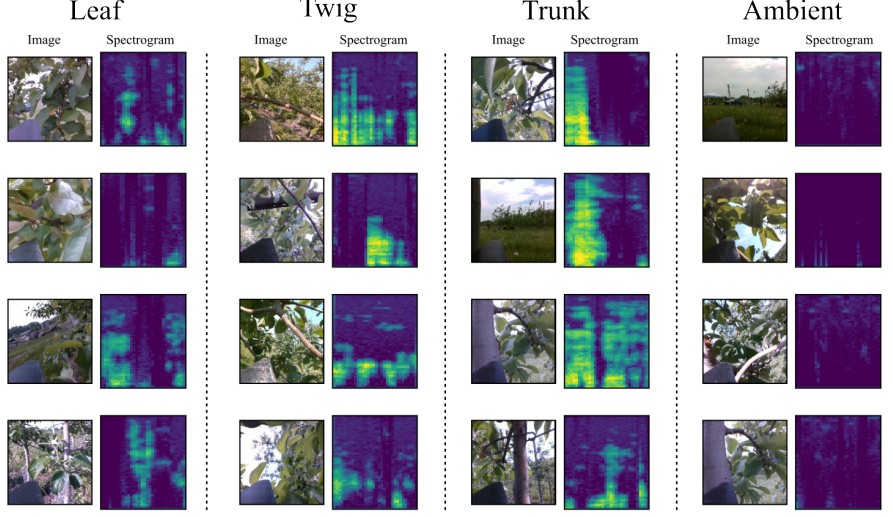
Audio-Visual Contact Classification for Tree Structures in AgricultureRyan Spears*, Moonyoung Lee*, George Kantor, Oliver Kroemer Humanoids, 2025 paper / website / We present a multi-modal classification framework that fuses audio and visual data to identify which part of a tree: leaf, twig, trunk, or ambient—a robot is in contact with. Multisensory data collected on human probe transfers zero-shot to different embodiment on the robot by leveraging audio pre-processing and pretraining. |
|
SonicBoom: Contact Localization Using Array of MicrophonesMoonyoung Lee, Uksang Yoo, Jean Oh, Jeffrey Ichnowski, George Kantor, Oliver Kroemer Robotics and Automation-Letters (RA-L), 2024 paper / website / youtube / We present SonicBoom, a holistic design of both hardware and data-driven framework that uses an array of contact microphones distributed across the robot end-effector link to localize contact. Using audio features from six microphones, a robot can estimate contact locations. |

|
Towards Autonomous Crop Monitoring: Inserting Sensors in Cluttered EnvironmentsMoonyoung Lee, Aaron Berger, Dominic Guri, Kevin Zhang, George Kantor, Oliver Kroemer Robotics and Automation-Letters (RA-L), 2023 paper / code / website / youtube / We present a robot platform that autonomously detects and inserts nitrate sensors into corn stalks. The robot was deployed in a cornfield in Iowa for evaluation. |
|
Towards Robotic Tree Manipulation: Leveraging Graph RepresentationsChung Hee Kim, Moonyoung Lee, Oliver Kroemer, George Kantor International Conference on Robotics and Automation (ICRA), 2023 paper / website / youtube / We present a framework for learning the deformation behavior of trees under contact interaction. Graph neural network is used to learn the forward model and action policy to manipulate trees. |

|
Task-Oriented Active Learning of Model Preconditions for Inaccurate Dynamics ModelsAlex Lagrassa, Moonyoung Lee, Oliver Kroemer International Conference on Robotics and Automation (ICRA), 2023 paper / website / We present an active learning algorithm that selects trajectories to learn model preconditions for planning with an inaccurate pre-specified dynamics model. |

|
3D Reconstruction-Based Seed Counting of Sorghum Panicles for Agricultural InspectionHarry Freeman, Eric Schneider, Chung Hee Kim, Moonyoung Lee, George Kantor International Conference on Robotics and Automation (ICRA), 2023 paper / youtube / dataset / We present a method for creating high-quality 3D models of sorghum panicles to estimate seed counts. This is acheived using seeds as semantic 3D landmarks for global registration and a novel density-based clustering approach. |
|
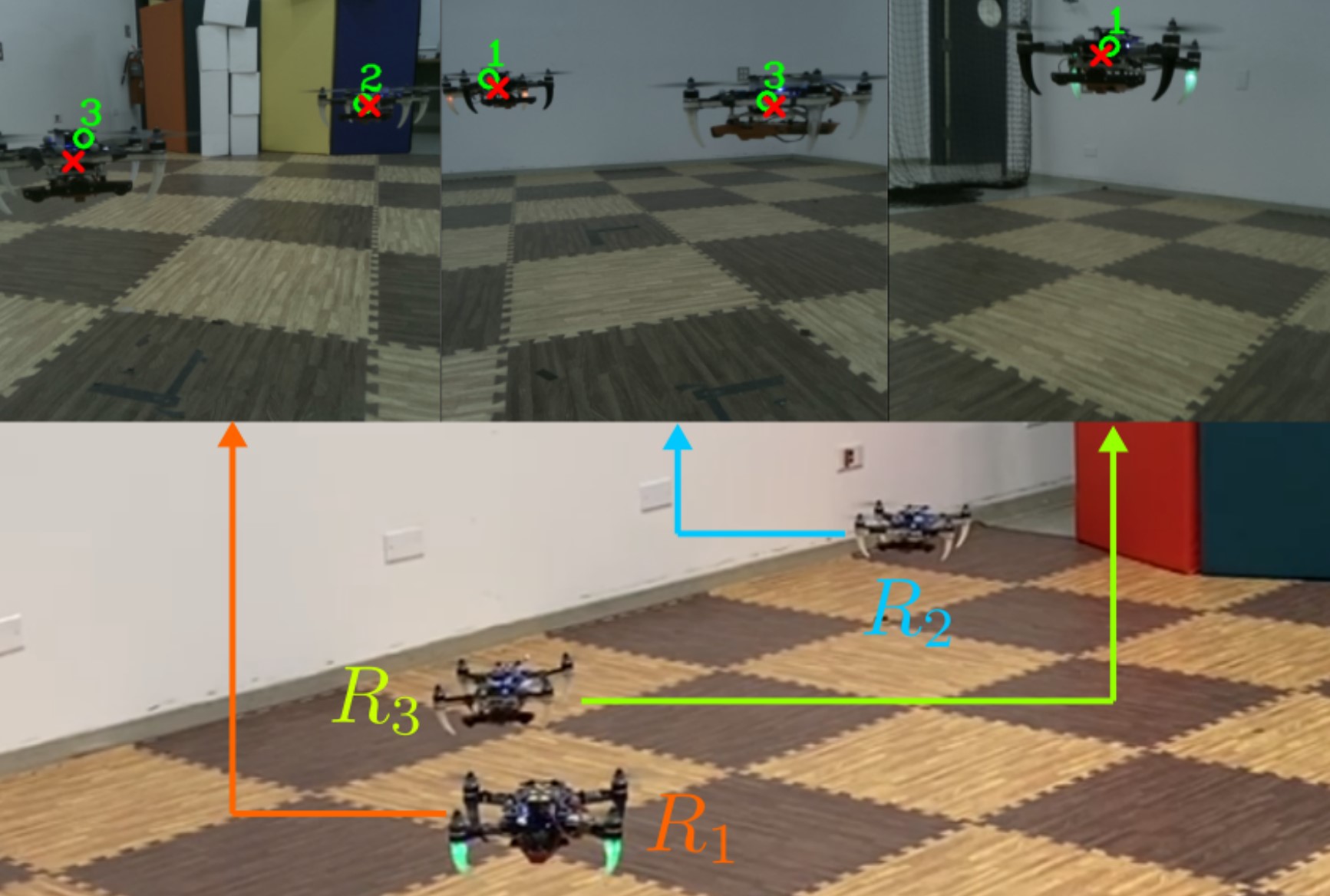
Vision-based Detection and Tracking for Relative Localization of Aerial SwarmsRendong Ge*, Moonyoung Lee*, Yang Zhou, Guanrui Rui, Giussepe Loianno International Conference on Intelligent Robots and Systems (IROS), 2022 paper / code / youtube / We present evaluations on vision-based decentralized Bayesian multi-tracking filtering strategies to resolve the association between the incoming unsorted measurements obtained by a visual detector algorithm and the tracked agents. We show computation tradeoff on running inference and tracking pipeline on-board. |
|
Dynamic Humanoid Locomotion Over Rough Terrain With Streamlined Perception-Control PipelineMoonyoung Lee, Youngsun Kwon, Sebin Lee, JongHun Choe, Junyoung Park, Hyobin Jeong, Yujin Heo, Min-Su Kim, Jo Sungho, Sung-Eui Yoon, Jun-Ho Oh International Conference on Intelligent Robots and Systems (IROS), 2021 paper / youtube / We present a geometric footstep planner and walking controller for a humanoid robot to dynamically walk across rough terrain at speeds up to 0.3 m/s. All visual sensing and compute are done on-board. |

|
Joint Space Position/Torque Hybrid Control of the Quadruped Robot for Locomotion and Push ReactionOkkee Sim, Hyobin Jeong, Jaesung Oh, Moonyoung Lee, Kang Kyu Lee, Hae-Won Park, Jun-Ho Oh International Conference on Robotics and Automation (ICRA), 2020 paper / youtube / We present a novel algorithm for joint space position/torque hybrid control of a mammal-type quadruped robot. With this control algorithm, the robot demonstrated both dynamic locomotion and push recovery abilities without torque control in the ab/ad joints. |

|
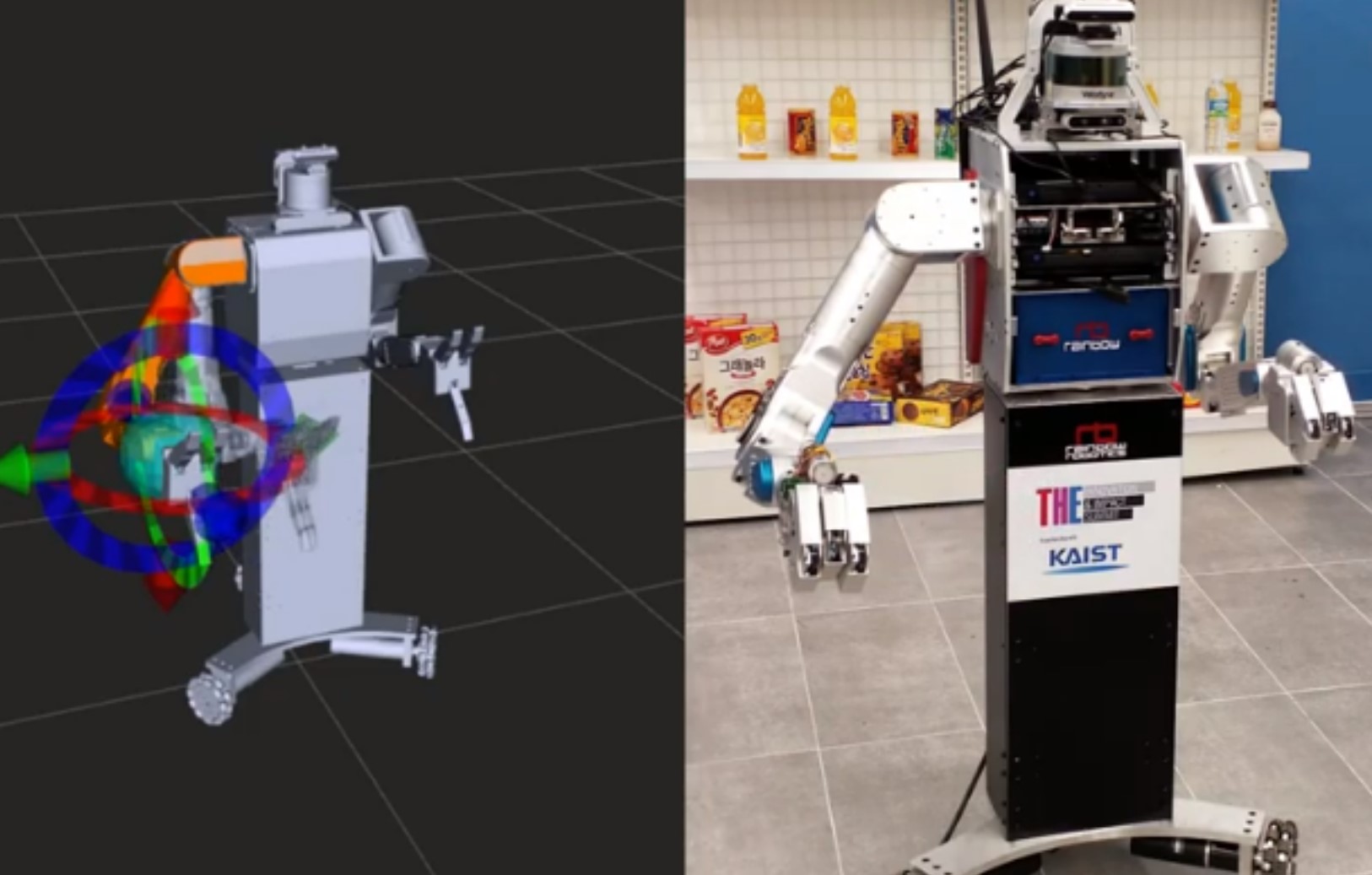
Fast Perception, Planning, and Execution for a Robotic Butler: Wheeled Humanoid M-HuboMoonyoung Lee, Yujin Heo, Jinyong Park, Hyun-Dae Yang, Ho-Deok Jang, Philipp Benz, Hyunsub Park, In So Kweon, Jun-Ho Oh International Conference on Intelligent Robots and Systems (IROS), 2019 paper / youtube / We present a new robotic butler system for a wheeled humanoid that is capable of fetching requested objects at 24% of the speed a human needs to fulfill the same task. We achieve this speedup by integrating a 3D object detection pipeline with a kinematically optimal manipulation planner to significantly increase speed performance at runtime. |
|
Motion Generation Interface of ROS to PODO Software Framework for Wheeled Humanoid RobotMoonyoung Lee, Yujin Heo, Saihim Cho, Hyunsub Park, Jun-Ho Oh International Conference on Advanced Robotics (ICAR), 2019 paper / We present a new motion generation interface between ROS and PODO that enables users to generate motion trajectories through standard ROS messages while leveraging a real-time motion controller. |
|
Design and source code from Jon Barron's website |